
So Sánh Động Cơ Điện Đồng Bộ Và Không Đồng Bộ – Kiến Thức Cho Người lao Động Việt Nam
1. Khái niệm động cơ điện đồng bộ và không đồng bộ
Động cơ xoay chiều lúc bấy giờ được chia thành 2 loại chính, đó là động cơ điện đồng bộ và động cơ điện không đồng bộ. Một động cơ điện không đồng bộ còn có tên gọi thông dụng là động cơ cảm ứng. Cả hai loại động cơ này có nhiều điểm khác nhau. Để làm rõ sự độc lạ này, tất cả chúng ta hãy cùng so sánh động cơ điện đồng bộ và không đồng bộ trong bài viết dưới đây .
Trước khi đi vào so sánh động cơ điện đồng bộ và không đồng bộ, tất cả chúng ta hãy cùng tìm hiểu và khám phá sơ lược về khái niệm của 2 loại động cơ này. Cần chú ý quan tâm, những thuật ngữ có tên gọi gần giống nhau, có tương quan đến công nghệ tiên tiến động cơ hoàn toàn có thể dễ gây ra sự nhầm lẫn .Vì đôi lúc nhiều thuật ngữ chỉ hoàn toàn có thể vận dụng ở những trường hợp rất cơ bản chứ không phải hàm chứa một điều gì đó độc lạ và nâng tầm. Và một trong những thuật ngữ cần quan tâm đó chính là “ động cơ đồng bộ ” và “ động cơ không đồng bộ ” .
Bạn đang đọc: So Sánh Động Cơ Điện Đồng Bộ Và Không Đồng Bộ
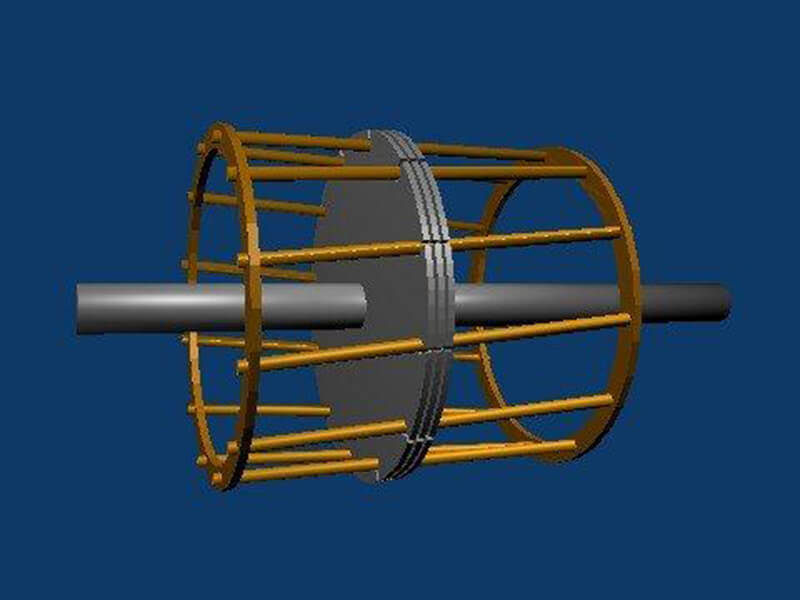
Cái “ lồng sóc ” này gồm có có nhiều thanh đồng hoặc thanh nhômTất cả những động cơ hoạt động giải trí dựa trên nguyên tắc cảm ứng điện từ ngày này ( induction motor – tạm gọi tắt là động cơ điện từ ) đều được xem là động cơ không đồng bộ. Bản chất không đồng bộ của quy trình vận hành động cơ điện từ đến từ sự trượt giữa vận tốc quay của từ trường tích hợp với vận tốc quay chậm hơn của rotor. Còn tại sao lại có sự trượt này, cần xem lại 1 yếu tố sâu xa hơn ở cấu trúc bên trong của động cơ .Cái “ lồng sóc ” này gồm có có nhiều thanh đồng hoặc thanh nhôm sắp xếp như hình ở trên. Chúng được nối với nhau bằng 2 vòng dẫn điện ở 2 đầu, làm cho những thanh ngắn mạch trọn vẹn với nhau. Còn phần lõi của rotor lại được làm bằng vật liệu thép .Bạn hoàn toàn có thể nhìn thấy những rãnh được chạy dọc theo bộ phận rotor. Các rãnh này thực ra cũng có nguyên do sống sót của nó, đặc biệt quan trọng là số lượng rãnh của rotor thường nhỏ hơn của stator. Hơn nữa, số lượng rãnh trên rotor cũng phải tránh không được là ước của stator, để tránh được thực trạng mắc kẹt từ trường ( còn gọi là magnetic interlock ) trong khi khởi động động cơ .Bên cạnh động cơ roto lồng sóc, tất cả chúng ta cũng hoàn toàn có thể thấy có rất nhiều loại động cơ sử dụng những cuộn dây. Lợi thế của kiểu cấu trúc này chính là hoàn toàn có thể giảm tốc khởi động của động cơ nhờ vào những điện trở được đấu tiếp nối đuôi nhau vào trong mỗi cuộn dây .Các cuộn dây sản sinh ra dòng điện do hoạt động giải trí theo kiểu sắp xếp vòng trượt. Khi động cơ đã đạt được vận tốc mong ước, thì nó sẽ chuyển qua một vòng ngắn mạch, và khi đó, động cơ lại quản lý và vận hành tương tự như như một động cơ lồng sóc .
2. So sánh động cơ điện đồng bộ và không đồng bộ
a) Khác nhau về cấu tạo
Những động cơ dựa trên nguyên tắc cảm ứng điện từ đều được gọi là động cơ không đồng bộ. Sự trượt giữa vận tốc quay của từ trường và vận tốc quay chậm hơn của rotor là thực chất không đồng bộ của việc vận hành động cơ điện tử .Động cơ không đồng bộ có một thành phần quay ( rotor ) được mô phỏng như kiểu lồng sóc .Cái lồng sóc này gồm nhiều thanh nhôm hoặc thanh đồng nối với nhau bằng 2 vòng dẫn điện ở 2 đầu làm những thanh gắn mạch trọn vẹn với nhau. Phần lõi của rotor được làm bằng thép .Ngoài động cơ không đồng bộ có sử dụng lồng sắt thì còn có nhiều loại sử dụng cuộn dây nhằm mục đích giảm bớt dòng khởi động của động cơ nhờ vào những điện trở được đấu tiếp nối đuôi nhau vào mỗi cuộn dây .Phần Stator của động cơ là phần đứng yên trong động cơ được nối với nguồn điện xoay chiều AC để tạo ra dòng điện chạy bên trong nó .

Động cơ không đồng bộĐộng cơ đồng bộ : Đây là cấu trúc động cơ đặc biệt quan trọng mà trong đó rotor quay cùng vận tốc với từ trường của Stator. Có 2 loại động cơ đồng bộ như sau :
- Kích từ độc lập: Hoạt động theo nguyên tắc tương tự giống như động cơ từ. Đây là động cơ có được từ trở thay đổi, bao gồm rotor làm bằng thép có các răng, thuộc kiểu cực lồi. Để chuyển rotor chạy sang vị trí kế tiếp, mạch điều khiển sẽ phải tuần tự chuyển đổi công suất sang cho các cuộn dây 1 cách tuyến tính, quá trình này cũng tương tự như ở động cơ bước.
- Kích từ trực tiếp: Được dùng với nam châm vĩnh cửu. Thiết kế này sẽ sử dụng 1 rotor có chứa một số nam châm vĩnh cửu và chúng có thể được lắp đặt ở trên bề mặt hoặc ráp vào phía trong.
b) Khác nhau về động cơ
Động cơ đồng bộ : Stato có những khe dọc theo phần trục, gồm có những khe của cuộn dây stato được làm theo 1 số ít cực đơn cử. Nói chung, 1 rotor cực mạnh thường được gắn trên đó 1 cuộn dây rôto. Cuộn dây roto sẽ phân phối cho nguồn phân phối DC nhờ vào sự trợ giúp của vòng trượt. Ngoài ra, bạn cũng hoàn toàn có thể sử dụng một cánh quạt cùng với nam châm hút vĩnh cửu là đủ .
Động cơ không đồng bộ: Cuộn dây stato bên trong cũng tương tự như động cơ đồng bộ. Đó là dấu hiệu cho một số cực cụ thể của một rôto lồng sóc hoặc một rôto dây quấn có thể được sử dụng. Trong rôto lồng sóc, các thanh rôto cũng được ngắn mạch vĩnh viễn cùng với các vòng cuối. Trong rôto dây quấn, cuộn dây cũng bị ngắn mạch vĩnh viễn, do đó lúc này sẽ không cần vòng trượt.
Động cơ không đồng bộ có nhiều điểm đặc biệt quan trọng
c) So sánh hiệu suất làm việc
Động cơ đồng bộ : Các cực của stato hoạt động quay với vận tốc đồng bộ ( Ns ) khi đã được phân phối điện bởi nguồn phân phối 3 pha. Các cánh quạt cũng được cung ứng với một nguồn điện DC. Roto cần được quay cùng với vận tốc gần với vận tốc đồng bộ của động cơ trong quy trình khởi động .Nếu được quản lý và vận hành như vậy, những cực của roto cũng được ghép từ tính với những cực của bộ phận stato quay. Khi đó, roto khởi đầu quay để đạt được vận tốc của động cơ đồng bộ. Động cơ đồng bộ thì sẽ luôn chạy ở vận tốc bằng với vận tốc đồng bộ của nó. Tức là vận tốc thực tiễn sẽ = vận tốc đồng bộ hoặc số vòng dây N = Ns = 120 f / P. .Động cơ không đồng bộ ( động cơ cảm ứng ) : Khi stato được cung ứng điện bởi nguồn cung ứng AC 2 pha hoặc 3 pha, từ trường quay ( ký hiệu RMF ) cũng được tạo ra. Tốc độ tương đối giữa từ trường quay của stato và phần rôto sẽ gây ra dòng điện cảm ứng bên trong những dây dẫn của rôto. Dòng điện rôto lúc này sẽ làm tăng thông cho lượng rôto .
Theo định luật Lenz, lúc này hướng của dòng điện cảm ứng chính là xu hướng chống lại nguyên nhân sản xuất ra nó, tức là tốc độ tương đối của từ trường quay RMF giữa stato và roto. Do đó, roto sẽ cố gắng để bắt kịp với RMF và giảm thiểu được tốc độ tương đối. Động cơ cảm ứng cũng sẽ luôn chạy ở tốc độ nhỏ hơn so với tốc độ đồng bộ, tức là: N
Động cơ cảm ứng luôn chạy ở vận tốc nhỏ hơn so với vận tốc đồng bộ
d) Độ bền và khả năng tiết kiệm năng lượng
Động cơ đồng bộ luôn nhu yếu phải có một nguồn điện 1 chiều DC bổ trợ để cung ứng nguồn năng lượng vào trong cuộn dây roto. Động cơ cảm ứng không đồng bộ thì không nhu yếu bất kể 1 nguồn nguồn năng lượng bổ trợ nào cả .Vòng trượt và bàn chải của động cơ được nhu yếu bên trong động cơ đồng bộ, nhưng không phải là ở trong động cơ cảm ứng. Ngoại trừ trường hợp động cơ cảm ứng loại dây quấn, trong đó động cơ vòng trượt sẽ được sử dụng để tăng thêm điện trở ở phía bên ngoài của cuộn dây rôto .Động cơ đồng bộ thường thì sẽ nhu yếu chính sách khởi động bổ trợ để cho khởi đầu quay roto gần bằng với vận tốc đồng bộ. Không có chính sách khởi động được nhu yếu ở bên trong động cơ cảm ứng .Hệ số hiệu suất được xác lập của động cơ đồng bộ còn hoàn toàn có thể được kiểm soát và điều chỉnh thành độ trễ, sự thống nhất hoặc đứng vị trí số 1 cũng như đổi khác giải pháp kích thích. Trong khi đó, động cơ không đồng bộ luôn chạy ở thông số hiệu suất trễ hơn. Động cơ đồng bộ thường hoạt động giải trí hiệu suất cao hơn so với động cơ cảm ứng. Nhưng về giá tiền mẫu sản phẩm, động cơ đồng bộ có ngân sách đắt đỏ hơn .
e) So sánh về ứng dụng trong thực tế
Động cơ đồng bộ được ứng dụng thoáng rộng trong những hệ điều khiển và tinh chỉnh nhu yếu phải có độ đúng mực cao và đem lại năng lực tiết kiệm chi phí điện năng rất là, đặc biệt quan trọng là khi chạy không tải hoặc có tải nhẹ. Do đó, động cơ đồng bộ thường được sử dụng nhiều trong những loại động cơ có hiệu suất lớn, ví dụ điển hình như : cần cẩu, máy xúc, máy kéo, …Động cơ không đồng bộ vốn là loại động cơ cung ứng được tối đa nhu yếu về việc kiểm soát và điều chỉnh vận tốc. Dãy hiệu suất của động cơ không đồng bộ khá rộng, trải dài từ vài W cho đến hàng nghìn KW. Trên thị trường lúc bấy giờ, hầu hết động cơ được sử dụng cho máy móc đều là động cơ 3 pha, chỉ có 1 sống dòng động cơ 1 pha là có hiệu suất động cơ thuộc dạng nhỏ .
Khi máy điện không đồng bộ 3 pha vận hành riêng lẻ, tức là khi không có dòng điện chạy vào dây quấn stato của động cơ. Lúc này người ta sẽ phải tiến hành kích từ cho máy. Đây chính cũng là nhược điểm lớn nhất chưa khắc phục được của chiếc máy phát điện chạy bằng động cơ không đồng bộ.
Kết luận
Bài viết trên đây đã cho những bạn những kiến thức và kỹ năng cơ bản về khái niệm động cơ đồng bộ và đ ộng cơ không đồng bộ. Đồng thời, so sánh động cơ điện đồng bộ và không đồng bộ để cho những bạn có được cái nhìn tổng lực hơn về 2 loại động cơ này, từ đó sẽ có sự lựa chọn đúng đắn nhất cho những thiết bị gia dụng cũng như trong quản lý và vận hành những máy móc khác .
Nội Dung Có Thể Bạn Quan Tâm:










