
Chuyển động học – Wikipedia tiếng Việt
Chuyển động học là một nhánh của cơ học cổ điển, có mục đích mô tả chuyển động của các điểm, vật thể và hệ vật trong khi bỏ qua nguyên nhân dẫn đến các chuyển động đó.[1][2][3] Chuyển động học là một lĩnh vực nghiên cứu, thường được gọi là “hình học của chuyển động” và đôi khi được xem là một nhánh của toán học.[4][5][6] Vấn đề về chuyển động học được phát sinh bằng việc mô tả lại hình dạng của hệ và khai báo các điều kiện ban đầu của bất kỳ giá trị đã biết nào về vị trí, vận tốc và/hoặc gia tốc các điểm trong hệ. Sau đó, sử dụng các lập luận từ hình học, vị trí, vecto và gia tốc của phần chưa biết trong hệ để xác định nó. Nghiên cứu về cách lực tác dụng lên các cơ quan nằm trong động học, chứ không phải chuyển động học. Để biết thêm thông tin, xem động học.
Chuyển động học được sử dụng trong vật lý thiên văn để diễn đạt sự hoạt động của những thiên thể và hệ thiên thể, trong kỹ thuật cơ khí, robot học và cơ sinh học [ 7 ] để diễn đạt hoạt động của những mạng lưới hệ thống gồm nhiều bộ phận ( mạng lưới hệ thống đa link ) ví dụ điển hình như một động cơ, một cánh tay robot hoặc bộ xương của khung hình con người .Các phép đổi khác hình học, còn được gọi là những phép đổi khác bảo toàn, được sử dụng để diễn đạt hoạt động của những thành phần trong mạng lưới hệ thống cơ khí, đơn giản hóa đạo hàm của những phương trình hoạt động. Chúng cũng là TT của nghiên cứu và phân tích động lực học .
Phân tích chuyển động là quá trình đo lường các đại lượng chuyển động dùng để mô tả chuyển động. Trong kỹ thuật, ví dụ, phân tích chuyển động học có thể được sử dụng để tìm phạm vi chuyển động cho một máy móc đã cho trước, và ngược lại, sử dụng tổng hợp động học để thiết kế một máy móc để đáp ứng phạm vi quỹ đạo cần thiết.[8] Ngoài ra, chuyển động học còn áp dụng hình học đại số để nghiên cứu hiệu suất cơ khí của một hệ cơ khí hay của máy móc.
Bạn đang đọc: Chuyển động học – Wikipedia tiếng Việt
Mục lục bài viết
Nguồn gốc thuật ngữ[sửa|sửa mã nguồn]
Thuật ngữ “kinematic” là từ tiếng Anh của cinématique của A.M. Ampère,[9] đã được ông đặt ra từ tiếng Hy Lạp cổ đại κίνημα kinema (“độ dời, quỹ đạo”), bản thân nó đã bắt nguồn từ κινεῖν kinein (“chuyển động”).[10][11]
” Kinematic ” và ” cinématique ” có tương quan đến từ cinéma trong tiếng Pháp, nhưng không từ nào bắt nguồn trực tiếp từ nó. Tuy nhiên, người ta đã Viral một từ gốc chung, như cinéma xuất phát từ dạng rút gọn của cinématographe, ” máy chiếu hình ảnh hoạt động và máy ảnh, ” từ này cũng được chuyển thể từ tiếng Hy Lạp và cũng là từ viết bằng tiếng Hy Lạp. [ 12 ]
Chuyển động học của quỹ đạo một chất điểm trong một trục tham chiếu không xoay[sửa|sửa mã nguồn]
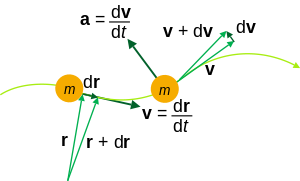 m, vị trí r, vecto v, gia tốc a.Đại lượng chuyển động học của một chất điểm cổ xưa : khối lượng, vị trí, vecto, tần suất
m, vị trí r, vecto v, gia tốc a.Đại lượng chuyển động học của một chất điểm cổ xưa : khối lượng, vị trí, vecto, tần suất
vector vị trí r, luôn chỉ thẳng từ gốc.
Vecto vận tốc v, luôn tiếp xúc với hướng chuyển động.
Vector gia tốc a, không song song với chuyển động xuyên tâm nhưng lại song song gia tốc góc và Coriolis, cũng không tiếp xúc với đường đi nhưng tiếp xúc với các gia tốc tâm và hướng tâm.
Vector chuyển động học trong những tọa độ cực phẳng. Lưu ý rằng thiết lập không bị số lượng giới hạn trong khoảng trống 2 d, hoàn toàn có thể một mặt phẳng với bất kể chiều cao nào .
Chuyển động học của chất điểm là nghiên cứu quỹ đạo của một chất điểm. Vị trí của một chất điểm được định nghĩa là vectơ tọa độ từ gốc của một trục tọa độ đến chất điểm đó. Ví dụ, xét một toà tháp cao 50 m ở phía Nam căn nhà của bạn và đặt gốc toạ độ là nhà bạn đang sống, sao cho phía Đông là trục x, và phía Bắc chỉ trục y, thì vecto toạ độ của đáy toà tháp là r = (0, −50, 0). Nếu toà tháp cao 50 m, thì vecto toạ độ của đỉnh tháp là r = (0, −50, 50).
Ở trường hợp tổng quát nhất, một hệ tọa độ ba chiều được sử dụng để xác lập vị trí của một chất điểm. Tuy nhiên, nếu chất điểm được cố định và thắt chặt chỉ chuyển dời trong một mặt phẳng thì chỉ cần sử dụng hệ trục toạ độ hai chiều. Tất cả những quan sát trong vật lý đều chưa hoàn hảo nếu những quan sát được miêu tả không được gắn vào trục tham chiếu .
Vecto vị trí của chất điểm là một vecto được vẽ từ gốc toạ độ đến chất điểm đó. Nó thể hiện cả khoảng cách điểm và hướng từ chất điểm đến gốc toạ độ. Trong hệ trục 3 chiều, vị trí của điểm P có thể được viết ở dạng
- P. = ( x P., y P, z P. ) = x P. ı ^ + y P ȷ ^ + z P. k ^, { \ displaystyle \ mathbf { P } = ( x_ { P }, y_ { P }, z_ { P } ) = x_ { P } { \ hat { \ imath } } + y_ { P } { \ hat { \ jmath } } + z_ { P } { \ hat { k } }, }

với
x
P
{\displaystyle x_{P}}

y
P
{\displaystyle y_{P}}

z
P
{\displaystyle z_{P}}

ı
^
{\displaystyle {\hat {\imath }}}

ȷ
^
{\displaystyle {\hat {\jmath }}}

k
^
{\displaystyle {\hat {k}}}

x
{\displaystyle x}

y
{\displaystyle y}

z
{\displaystyle z}

|
P
|
{\displaystyle \left|\mathbf {P} \right|}

P
{\displaystyle \mathbf {P} }

- | P. | = x P. 2 + y P. 2 + z P. 2. { \ displaystyle | \ mathbf { P } | = { \ sqrt { x_ { P } ^ { \ 2 } + y_ { P } ^ { \ 2 } + z_ { P } ^ { \ 2 } } }. }

Các cosin chỉ hướng của vector vị trí cung ứng một thước đo định lượng của hướng. Lưu ý quan trọng rằng vecto vị trí của một chất điểm không phải là duy nhất. Vector vị trí của một chất điểm đã cho khác nhau so với những trục tham chiếu khác nhau .
Quỹ đạo của chất điểm là một hàm vecto theo thời gian,
P
(
t
)
{\displaystyle \mathbf {P} (t)}

- P. ( t ) = x P. ( t ) ı ^ + y P ( t ) ȷ ^ + z P. ( t ) k ^, { \ displaystyle \ mathbf { P } ( t ) = x_ { P } ( t ) { \ hat { \ imath } } + y_ { P } ( t ) { \ hat { \ jmath } } + z_ { P } ( t ) { \ hat { k } }, }

với toạ độ xP, yP và zP là các hàm phụ thuộc thời gian.
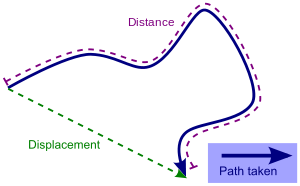 Quãng đường vận động và di chuyển luôn luôn lớn hơn hoặc bằng độ dời .
Quãng đường vận động và di chuyển luôn luôn lớn hơn hoặc bằng độ dời .
Vận tốc và vận tốc[sửa|sửa mã nguồn]
Vận tốc của chất điểm là đại lượng vecto miêu tả hướng và độ lớn hoạt động của chất điểm. Về mặt toán học, vận tốc biến hóa của vectơ vị trí của một chất điểm, tương quan đến thời hạn là tốc độ của chất điểm đó. Xét tỉ số được hình thành bằng cách chia khoảng cách hai vị trí của một chất điểm cho khoảng chừng thời hạn. Tỉ số này được gọi là tốc độ trung bình trong khoảng chừng thời hạn đó và được định nghĩa dạng Vận tốc = độ dời / thời hạn triển khai
- V ¯ = Δ P Δ t { \ displaystyle { \ overline { \ mathbf { V } } } = { \ frac { \ Delta \ mathbf { P } } { \ Delta t } } \, }

với ΔP là hiệu của vecto vị trí trong khoảng thời gian Δt.
Giới hạn khoảng thời gian Δt trở nên càng nhỏ, vận tốc trung bình trở thành đạo hàm theo thời gian của vector vị trí,
- V = lim Δ t → 0 Δ P Δ t = d P. d t = P. ˙ = x ˙ p ı ^ + y ˙ P. ȷ ^ + z ˙ P. k ^. { \ displaystyle \ mathbf { V } = \ lim _ { \ Delta t \ rightarrow 0 } { \ frac { \ Delta \ mathbf { P } } { \ Delta t } } = { \ frac { d \ mathbf { P } } { dt } } = { \ dot { \ mathbf { P } } } = { \ dot { x } } _ { p } { \ hat { \ imath } } + { \ dot { y } } _ { P } { \ hat { \ jmath } } + { \ dot { z } } _ { P } { \ hat { k } }. }

Do đó, tốc độ là thương của sự biến hóa vị trí của một chất điểm với thời hạn thực thi biến hóa, và dấu chấm bộc lộ đạo hàm của những hàm x, y và z theo thời hạn. Ngoài ra, tốc độ còn là tiếp tuyến với quỹ đạo của chất điểm ở mọi vị trí của chất điểm dọc theo đường đi của nó. Lưu ý rằng trong hệ quy chiếu không xoay, đạo hàm của những trục toạ độ không được xem là hướng của nó và độ lớn không biến hóa .
Tốc độ của một vật là độ lớn |V| của vận tốc. Nó là một đại lượng vô hướng:
- | V | = | P ˙ | = d s d t, { \ displaystyle | \ mathbf { V } | = | { \ dot { \ mathbf { P } } } | = { \ frac { ds } { dt } }, }

với s là chiều dài cung được đo dọc theo quỹ đạo của chất điểm. Chiều dài cung này là sự di chuyển của một chất điểm theo thời gian là một lượng không giảm. Do đó, ds/dt không âm, qua đó thể hiện rằng vận tốc cũng không âm.
Vecto tốc độ hoàn toàn có thể biến hóa hướng hay độ lớn hay cả hai cùng lúc. Do đó, tần suất là vận tốc biến hóa độ lớn của vector tốc độ cộng với vận tốc đổi khác hướng của vector tốc độ đó. Giống với việc dựa vào vị trí của chất điểm để xác lập tốc độ của nó, ta cũng hoàn toàn có thể dựa vào vecto tốc độ để xác lập vecto tần suất. Gia tốc của một chất điểm là vector được xác lập bởi vận tốc biến hóa của vector tốc độ. Gia tốc trung bình của một chất điểm được định nghĩa bởi công thức .
- A ¯ = Δ V Δ t { \ displaystyle { \ overline { \ mathbf { A } } } = { \ frac { \ Delta \ mathbf { V } } { \ Delta t } } \, }

với ΔV là hiệu vecto vận tốc và Δt là khoảng thời gian.
Gia tốc của chất điểm là số lượng giới hạn của tần suất trung bình khi khoảng chừng thời hạn tiến tới 0, là một phép đạo hàm theo thời hạn ,
- Phương trình 1) A = lim Δ t → 0 Δ V Δ t = d V d t = V ˙ = v ˙ x ı ^ + v ˙ y ȷ ^ + v ˙ z k ^ { \ displaystyle \ mathbf { A } = \ lim _ { \ Delta t \ rightarrow 0 } { \ frac { \ Delta \ mathbf { V } } { \ Delta t } } = { \ frac { d \ mathbf { V } } { dt } } = { \ dot { \ mathbf { V } } } = { \ dot { v } } _ { x } { \ hat { \ imath } } + { \ dot { v } } _ { y } { \ hat { \ jmath } } + { \ dot { v } } _ { z } { \ hat { k } } }

hay
- A = P. ¨ = x ¨ p ı ^ + y ¨ P. ȷ ^ + z ¨ P. k ^ { \ displaystyle \ mathbf { A } = { \ ddot { \ mathbf { P } } } = { \ ddot { x } } _ { p } { \ hat { \ imath } } + { \ ddot { y } } _ { P } { \ hat { \ jmath } } + { \ ddot { z } } _ { P } { \ hat { k } } }

Do đó, tần suất là đạo hàm bật nhất của vecto tốc độ và là đạo hàm bậc hai của vecto vị trí của chất điểm. Lưu ý rằng trong hệ quy chiếu không xoay, đạo hàm của những trục toạ độ không được xem là hướng của nó và độ lớn không biến hóa .
Độ lớn của gia tốc của một vật là độ lớn |A| của vecto gia tốc của nó. Nó là một đại lượng vô hướng:
- | A | = | V ˙ | = d v d t, { \ displaystyle | \ mathbf { A } | = | { \ dot { \ mathbf { V } } } | = { \ frac { dv } { dt } }, }

Vecto vị trí tương đối[sửa|sửa mã nguồn]
Một vecto vị trí tương đối là một vectơ xác định vị trí của một điểm tương ứng với một điểm khác. Đó là sự khác biệt về vị trí của hai điểm.
Vị trí tương đối của một điểm A tương đối so với điểm B khác hiểu đơn giản là sự chênh lệch giữa các vị trí của chúng
P
A
/
B
=
P
A
−
P
B
{\displaystyle \mathbf {P} _{A/B}=\mathbf {P} _{A}-\mathbf {P} _{B}}

đó là sự chênh lệch giữa những vectơ thành phần vị trí của chúng .
Nếu điểm A có các vị trí thành phần
P
A
=
(
X
A
,
Y
A
,
Z
A
)
{\displaystyle \mathbf {P} _{A}=\left(X_{A},Y_{A},Z_{A}\right)}

Nếu điểm B có các vị trí thành phần
P
B
=
(
X
B
,
Y
B
,
Z
B
)
{\displaystyle \mathbf {P} _{B}=\left(X_{B},Y_{B},Z_{B}\right)}

thì vị trí của điểm A so với điểm B là sự chênh lệch giữa các thành phần của chúng:
P
A
/
B
=
P
A
−
P
B
=
(
X
A
−
X
B
,
Y
A
−
Y
B
,
Z
A
−
Z
B
)
{\displaystyle \mathbf {P} _{A/B}=\mathbf {P} _{A}-\mathbf {P} _{B}=\left(X_{A}-X_{B},Y_{A}-Y_{B},Z_{A}-Z_{B}\right)}

Vận tốc tương đối[sửa|sửa mã nguồn]
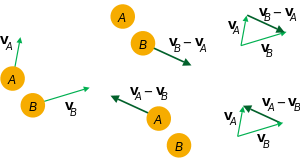 Vận tốc tương đối giữa hai chất điểm trong cơ học cổ xưa .Vận tốc của một chất điểm tương đối so với chất điểm khác hiểu đơn thuần là sự chênh lệch giữa tốc độ của chúng
Vận tốc tương đối giữa hai chất điểm trong cơ học cổ xưa .Vận tốc của một chất điểm tương đối so với chất điểm khác hiểu đơn thuần là sự chênh lệch giữa tốc độ của chúng
V
A
/
B
=
V
A
−
V
B
{\displaystyle \mathbf {V} _{A/B}=\mathbf {V} _{A}-\mathbf {V} _{B}}

và là hiệu của những thành phần của vecto tốc độ .
Nếu điểm A có các thành phần vecto vận tốc
V
A
=
(
V
A
x
,
V
A
y
,
V
A
z
)
{\displaystyle \mathbf {V} _{A}=\left(V_{A_{x}},V_{A_{y}},V_{A_{z}}\right)}

và điểm B có các thành phần vecto vận tốc
V
B
=
(
V
B
x
,
V
B
y
,
V
B
z
)
{\displaystyle \mathbf {V} _{B}=\left(V_{B_{x}},V_{B_{y}},V_{B_{z}}\right)}

thì vận tốc tương đối của điểm A so với điểm B là hiệu các thành phần của chúng:
V
A
/
B
=
V
A
−
V
B
=
(
V
A
x
−
V
B
x
,
V
A
y
−
V
B
y
,
V
A
z
−
V
B
z
)
{\displaystyle \mathbf {V} _{A/B}=\mathbf {V} _{A}-\mathbf {V} _{B}=\left(V_{A_{x}}-V_{B_{x}},V_{A_{y}}-V_{B_{y}},V_{A_{z}}-V_{B_{z}}\right)}

Ngoài ra, kết quả tương tự này có thể thu được bằng cách tính toán đạo hàm thời gian của vector vị trí tương đối RB/A.
Trong trường hợp vận tốc gần bằng vận tốc ánh sáng c (thường trong khoảng 95%), một dạng khác của vận tốc tương đối được gọi là tốc độ nhanh, phụ thuộc vào tỷ lệ giữa V và c, được sử dụng trong thuyết tương đối hẹp.
Gia tốc tương đối[sửa|sửa mã nguồn]
Gia tốc tương đối của điểm C với điểm B khác hiệu đơn giản là sự chênh lệch gia tốc giữa chúng
A
C
/
B
=
A
C
−
A
B
{\displaystyle \mathbf {A} _{C/B}=\mathbf {A} _{C}-\mathbf {A} _{B}}

và là sự chênh lệch của những vecto tần suất thành phần .
Nếu điểm C có các gia tốc thành phần
A
C
=
(
A
C
x
,
A
C
y
,
A
C
z
)
{\displaystyle \mathbf {A} _{C}=\left(A_{C_{x}},A_{C_{y}},A_{C_{z}}\right)}

và điểm B có các gia tốc thành phần
A
B
=
(
A
B
x
,
A
B
y
,
A
B
z
)
{\displaystyle \mathbf {A} _{B}=\left(A_{B_{x}},A_{B_{y}},A_{B_{z}}\right)}

thì gia tốc tương đối của điểm C so với điểm B là hiệu giữa các gia tốc thành phần:
A
C
/
B
=
A
C
−
A
B
=
(
A
C
x
−
A
B
x
,
A
C
y
−
A
B
y
,
A
C
z
−
A
B
z
)
{\displaystyle \mathbf {A} _{C/B}=\mathbf {A} _{C}-\mathbf {A} _{B}=\left(A_{C_{x}}-A_{B_{x}},A_{C_{y}}-A_{B_{y}},A_{C_{z}}-A_{B_{z}}\right)}

Ngoài ra, kết quả tương tự này có thể thu được bằng cách tính toán đạo hàm bậc hai của vectơ vị trí tương đối PB/A.
Quỹ đạo những chất điểm dưới tần suất không đổi[sửa|sửa mã nguồn]
Nếu gia tốc là một hằng số, phương trình vi phân Eq 1) có thể được tích phân trở thành vector gia tốc “A” của điểm “P” với hướng và độ lớn là hằng số. Một điểm như vậy được cho là chuyển động biến đổi đều[cần dẫn nguồn]. Trong trường hợp này, vận tốc V(t) và sau đó quỹ đạo P (t) của chất điểm có thể thu được bằng cách tích phân phương trình gia tốc A theo thời gian.[13]
Giả sử rằng các điều kiện ban đầu của vị trí,
P
0
{\displaystyle \mathbf {P} _{0}}

V
0
{\displaystyle \mathbf {V} _{0}}

t
=
0
{\displaystyle t=0}

- V ( t ) = V 0 + ∫ 0 t A d τ = V 0 + A t. { \ displaystyle \ mathbf { V } ( t ) = \ mathbf { V } _ { 0 } + \ int _ { 0 } ^ { t } \ mathbf { A } d \ tau = \ mathbf { V } _ { 0 } + \ mathbf { A } t. }

Tích phân cấp hai cho ra đường đi của nó ( quỹ đạo ) ,
- P. ( t ) = P. 0 + ∫ 0 t V ( τ ) d τ = P. 0 + ∫ 0 t ( V 0 + A τ ) d τ = P. 0 + V 0 t + 1 2 A t 2. { \ displaystyle \ mathbf { P } ( t ) = \ mathbf { P } _ { 0 } + \ int _ { 0 } ^ { t } \ mathbf { V } ( \ tau ) d \ tau = \ mathbf { P } _ { 0 } + \ int _ { 0 } ^ { t } ( \ mathbf { V } _ { 0 } + \ mathbf { A } \ tau ) d \ tau = \ mathbf { P } _ { 0 } + \ mathbf { V } _ { 0 } t + { \ tfrac { 1 } { 2 } } \ mathbf { A } t ^ { 2 }. }

Ngoài ra, mối quan hệ giữa độ dời, tốc độ, tần suất và thời hạn hoàn toàn có thể được lập ra. Vì tần suất là hằng số nên ,
- A = Δ V Δ t = V − V 0 t { \ displaystyle \ mathbf { A } = { \ frac { \ Delta \ mathbf { V } } { \ Delta t } } = { \ frac { \ mathbf { V } – \ mathbf { V } _ { 0 } } { t } } }

- P. ( t ) = P. 0 + ( V + V 0 2 ) t. { \ displaystyle \ mathbf { P } ( t ) = \ mathbf { P } _ { 0 } + \ left ( { \ frac { \ mathbf { V } + \ mathbf { V } _ { 0 } } { 2 } } \ right ) t. }

Mối quan hệ giữa tốc độ, vị trí và tần suất không nhờ vào thời hạn hoàn toàn có thể được lập ra bằng cách chuyển tần suất trung bình theo thời hạn và thay thế sửa chữa và đơn giản hóa
- t = V − V 0 A { \ displaystyle t = { \ frac { \ mathbf { V } – \ mathbf { V } _ { 0 } } { \ mathbf { A } } } }

-
(
P
−
P
0
)
∘A
=
(
V
−
V
0
)
∘
V
+
V
0
2
{\displaystyle (\mathbf {P} -\mathbf {P} _{0})\circ \mathbf {A} =\left(\mathbf {V} -\mathbf {V} _{0}\right)\circ {\frac {\mathbf {V} +\mathbf {V} _{0}}{2}}\,}

với dấu ∘ bộc lộ tích vô hướng, nhằm mục đích biểu lộ hiệu quả vô hướng chứ không phải là một vecto .
- 2 ( P − P 0 ) ∘ A = | V | 2 − | V 0 | 2. { \ displaystyle 2 ( \ mathbf { P } – \ mathbf { P } _ { 0 } ) \ circ \ mathbf { A } = | \ mathbf { V } | ^ { 2 } – | \ mathbf { V } _ { 0 } | ^ { 2 }. }

Dấu chấm có thể được thay thế bằng cosin của góc
α
{\displaystyle \alpha }

- 2 | P. − P. 0 | ⋅ | A | ⋅ cos α = | V | 2 − | V 0 | 2. { \ displaystyle 2 | \ mathbf { P } – \ mathbf { P } _ { 0 } | \ cdot | \ mathbf { A } | \ cdot \ cos \ alpha = | \ mathbf { V } | ^ { 2 } – | \ mathbf { V } _ { 0 } | ^ { 2 }. }

Trong trường hợp gia tốc luôn cùng hướng chuyển động, góc (
α
{\displaystyle \alpha }
) giữa các vecto bằng 0, vì
cos
0
=
1
{\displaystyle \cos 0=1}

- | V | 2 = | V 0 | 2 + 2 | A | ⋅ | P. − P. 0 |. { \ displaystyle | \ mathbf { V } | ^ { 2 } = | \ mathbf { V } _ { 0 } | ^ { 2 } + 2 | \ mathbf { A } | \ cdot | \ mathbf { P } – \ mathbf { P } _ { 0 } |. }

Điều này có thể được đơn giản hóa bằng cách sử dụng ký hiệu cho độ lớn của vectơ
|
|
A
|
|
=
a
,
|
|
V
|
|
=
v
,
|
|
P
−
P
0
|
|
=
Δ
x
{\displaystyle ||\mathbf {A} ||=a,||\mathbf {V} ||=v,||\mathbf {P} -\mathbf {P} _{0}||=\Delta x}

Δ
x
{\displaystyle \Delta x}

- v 2 = v 0 2 + 2 a ⋅ Δ x. { \ displaystyle v ^ { 2 } = v_ { 0 } ^ { 2 } + 2 a \ cdot \ Delta x. }

Điều này rút gọn phương trình tham số chuyển động của chất điểm thành mối quan hệ trong trục toạ độ Descartes của tốc độ so với vị trí. Mối quan hệ này rất hữu ích khi không xác định được thời gian. Ta cũng biết rằng
Δ
x
=
∫
(
v
)
d
t
{\displaystyle \Delta x=\int (v)dt}

Δ
x
{\displaystyle \Delta x}
là diện tích dưới biểu đồ a, v, t[14]
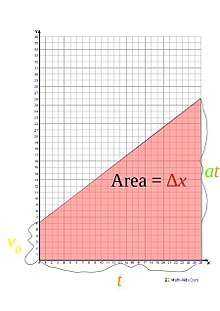 Biểu đồ vật lí giữa Vận tốc-Thời gian
Biểu đồ vật lí giữa Vận tốc-Thời gian
. Ta có thể tìm
Δ
x
{\displaystyle \Delta x}
bằng cách cộng phần diện tích ở trên và phần diện tích bên dưới. Phần diện tích bên dưới là một hình chữ nhật, và diện tích hình chữ nhật bằng
A
⋅
B
{\displaystyle A\cdot B}

A
{\displaystyle A}

B
{\displaystyle B}

A
=
t
{\displaystyle A=t}

B
=
v
0
{\displaystyle B=v_{0}}

A
{\displaystyle A}
ở đây có gia tốc khác nhau
a
{\displaystyle a}

t
v
0
{\displaystyle tv_{0}}

1
2
B
H
{\displaystyle {\frac {1}{2}}BH}

B
{\displaystyle B}
là cạnh đáy và
H
{\displaystyle H}

B
=
t
{\displaystyle B=t}

H
=
a
t
{\displaystyle H=at}

A
=
1
2
B
H
=
1
2
a
t
t
=
1
2
a
t
2
=
a
t
2
2
{\displaystyle A={\frac {1}{2}}BH={\frac {1}{2}}att={\frac {1}{2}}at^{2}={\frac {at^{2}}{2}}}

t
v
0
{\displaystyle tv_{0}}
và
a
t
2
2
{\displaystyle {\frac {at^{2}}{2}}}

Δ
x
{\displaystyle \Delta x}
là biểu thức
Δ
x
=
t
v
0
+
a
t
2
2
{\displaystyle \Delta x=tv_{0}+{\frac {at^{2}}{2}}}

v
{\displaystyle v}

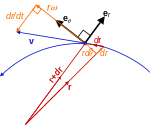
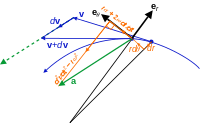
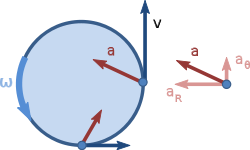 aθ làm tăng tốc độ quay: dω/dt = |aθ|/R.Hình 2 : Vận tốc và tần suất cho hoạt động tròn không đều : vector tốc độ là tiếp tuyến với quỹ đạo, nhưng vector tần suất không hướng vào bên trong vì thành phần tiếp tuyến của nólàm tăng vận tốc quay : d / d = | | /
aθ làm tăng tốc độ quay: dω/dt = |aθ|/R.Hình 2 : Vận tốc và tần suất cho hoạt động tròn không đều : vector tốc độ là tiếp tuyến với quỹ đạo, nhưng vector tần suất không hướng vào bên trong vì thành phần tiếp tuyến của nólàm tăng vận tốc quay : d / d = | | /
Quỹ đạo chất điểm trong toạ độ cực hình trụ[sửa|sửa mã nguồn]
Để thuận tiện, người ta thường xây dựng quỹ đạo của một chất điểm P(t) = (X(t), Y(t) và Z(t)) bằng cách sử dụng tọa độ cực trong mặt phẳng X–Y. Trong trường hợp này, vận tốc và gia tốc của nó ở một dạng thuận tiện.
Nhớ lại rằng quỹ đạo của một chất điểm P được xác định bởi vector tọa độ P của nó được đo trong một khung tham chiếu cố định F. Khi chất điểm di chuyển, vector tọa độ P(t) dọc theo quỹ đạo của nó, đó là một đường cong trong không gian, được cho bởi:
- P. ( t ) = X ( t ) ı ^ + Y ( t ) ȷ ^ + Z ( t ) k ^, { \ displaystyle { \ textbf { P } } ( t ) = X ( t ) { \ hat { \ imath } } + Y ( t ) { \ hat { \ jmath } } + Z ( t ) { \ hat { k } }, }

với i, j và k lần lượt là vecto đơn vị dọc theo các trục X, Y và Z của khung tham chiếu F.
Xét một chất điểm P chỉ di chuyển trên bề mặt của hình trụ tròn R(t)=hằng số, có thể căn chỉnh trục Z của khung cố định F với trục của hình trụ. Khi đó, góc θ quanh trục này trong mặt phẳng X–Y có thể được sử dụng để xác định quỹ đạo như sau,
- P. ( t ) = R cos θ ( t ) ı ^ + R sin θ ( t ) ȷ ^ + Z ( t ) k ^. { \ displaystyle { \ textbf { P } } ( t ) = R \ cos \ theta ( t ) { \ hat { \ imath } } + R \ sin \ theta ( t ) { \ hat { \ jmath } } + Z ( t ) { \ hat { k } }. }

Các tọa độ hình trụ cho P(t) có thể được đơn giản hóa bằng cách đưa vào các vector đơn vị xuyên tâm và tiếp tuyến,
- e r = cos θ ( t ) ı ^ + sin θ ( t ) ȷ ^, e θ = − sin θ ( t ) ı ^ + cos θ ( t ) ȷ ^. { \ displaystyle { \ textbf { e } } _ { r } = \ cos \ theta ( t ) { \ hat { \ imath } } + \ sin \ theta ( t ) { \ hat { \ jmath } }, \ quad { \ textbf { e } } _ { \ theta } = – \ sin \ theta ( t ) { \ hat { \ imath } } + \ cos \ theta ( t ) { \ hat { \ jmath } }. }

và đạo hàm thời hạn của chúng từ phép tính cơ bản :
- d d t e r = e ˙ r = θ ˙ e θ { \ displaystyle { \ frac { d } { dt } } { \ textbf { e } } _ { r } = { \ dot { \ textbf { e } } } _ { r } = { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } }
- d d t e ˙ r = e ¨ r = θ ¨ e θ − θ ˙ e r { \ displaystyle { \ frac { d } { dt } } { \ dot { \ textbf { e } } } _ { r } = { \ ddot { \ textbf { e } } } _ { r } = { \ ddot { \ theta } } { \ textbf { e } } _ { \ theta } – { \ dot { \ theta } } { \ textbf { e } } _ { r } }


- d d t e θ = e ˙ θ = − θ ˙ e r { \ displaystyle { \ frac { d } { dt } } { \ textbf { e } } _ { \ theta } = { \ dot { \ textbf { e } } } _ { \ theta } = – { \ dot { \ theta } } { \ textbf { e } } _ { r } }
- d d t e ˙ θ = e ¨ θ = − θ ¨ e r − θ ˙ 2 e θ { \ displaystyle { \ frac { d } { dt } } { \ dot { \ textbf { e } } } _ { \ theta } = { \ ddot { \ textbf { e } } } _ { \ theta } = – { \ ddot { \ theta } } { \ textbf { e } } _ { r } – { \ dot { \ theta } } ^ { 2 } { \ textbf { e } } _ { \ theta } }


Với quy ước này, P(t) có dạng,
- P. ( t ) = R e r + Z ( t ) k ^, { \ displaystyle { \ textbf { P } } ( t ) = R { \ textbf { e } } _ { r } + Z ( t ) { \ hat { k } }, }

với R là hằng số trong trường hợp chất điểm chuyển động chỉ trên bề mặt của hình trụ có bán kính R.
Nói chung, quỹ đạo P(t) không bị ràng buộc nằm trên một hình trụ tròn, do đó bán kính R thay đổi theo thời gian và quỹ đạo của chất điểm trong tọa độ cực hình trụ trở thành:
- P. ( t ) = R ( t ) e r + Z ( t ) k ^. { \ displaystyle { \ textbf { P } } ( t ) = R ( t ) { \ textbf { e } } _ { r } + Z ( t ) { \ hat { k } }. }

Trong đó R, theta và Z có thể là các hàm có thể thay đổi liên tục theo thời gian và ký hiệu hàm bị giảm cho đơn giản. Vecto vận tốc VP là đạo hàm theo thời gian của quỹ đạo P(t), cho ra:
V
P
=
d
d
t
(
R
e
r
+
Z
k
^
)
=
R
˙
e
r
+
R
e
˙
r
+
Z
˙
k
^
=
R
˙
e
r
+
R
θ
˙
e
θ
+
Z
˙
k
^
{\displaystyle {\textbf {V}}_{P}={\frac {d}{dt}}(R{\textbf {e}}_{r}+Z{\hat {k}})={\dot {R}}{\textbf {e}}_{r}+R{\dot {\textbf {e}}}_{r}+{\dot {Z}}{\hat {k}}={\dot {R}}{\textbf {e}}_{r}+R{\dot {\theta }}{\textbf {e}}_{\theta }+{\dot {Z}}{\hat {k}}}

Tương tự, gia tốc AP là đạo hàm theo thời gian của vận tốc VP, được cho bởi:
- A P = d d t ( R ˙ e r + R θ ˙ e θ + Z ˙ k ^ ) = ( R ¨ − R θ ˙ 2 ) e r + ( R θ ¨ + 2 R ˙ θ ˙ ) e θ + Z ¨ k ^. { \ displaystyle { \ textbf { A } } _ { P } = { \ frac { d } { dt } } ( { \ dot { R } } { \ textbf { e } } _ { r } + R { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } + { \ dot { Z } } { \ hat { k } } ) = ( { \ ddot { R } } – R { \ dot { \ theta } } ^ { 2 } ) { \ textbf { e } } _ { r } + ( R { \ ddot { \ theta } } + 2 { \ dot { R } } { \ dot { \ theta } } ) { \ textbf { e } } _ { \ theta } + { \ ddot { Z } } { \ hat { k } }. }

Thuật ngữ
−
R
θ
˙
2
e
r
{\displaystyle -R{\dot {\theta }}^{2}{\textbf {e}}_{r}}

2
R
˙
θ
˙
e
θ
{\displaystyle 2{\dot {R}}{\dot {\theta }}{\textbf {e}}_{\theta }}

If the trajectory of the particle is constrained to lie on a cylinder, then the radius R is constant and the velocity and acceleration vectors simplify. The velocity of VP is the time derivative of the trajectory P(t),
- V P. = d d t ( R e r + Z k ^ ) = R θ ˙ e θ + Z ˙ k ^. { \ displaystyle { \ textbf { V } } _ { P } = { \ frac { d } { dt } } ( R { \ textbf { e } } _ { r } + Z { \ hat { k } } ) = R { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } + { \ dot { Z } } { \ hat { k } }. }

The acceleration vector becomes :
- A P = d d t ( R θ ˙ e θ + Z ˙ k ^ ) = − R θ ˙ 2 e r + R θ ¨ e θ + Z ¨ k ^. { \ displaystyle { \ textbf { A } } _ { P } = { \ frac { d } { dt } } ( R { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } + { \ dot { Z } } { \ hat { k } } ) = – R { \ dot { \ theta } } ^ { 2 } { \ textbf { e } } _ { r } + R { \ ddot { \ theta } } { \ textbf { e } } _ { \ theta } + { \ ddot { Z } } { \ hat { k } }. }

Chuyển động tròn[sửa|sửa mã nguồn]
 [18]Each particle on the wheel travels in a planar circular trajectory ( Kinematics of Machinery, 1876 ) .Một trường hợp đặc biệt quan trọng của quỹ đạo hạt trên một hình tròn trụ tròn xảy ra khi không có hoạt động dọc theo trục Z
[18]Each particle on the wheel travels in a planar circular trajectory ( Kinematics of Machinery, 1876 ) .Một trường hợp đặc biệt quan trọng của quỹ đạo hạt trên một hình tròn trụ tròn xảy ra khi không có hoạt động dọc theo trục Z
- P. ( t ) = R e r + Z 0 k ^, { \ displaystyle { \ textbf { P } } ( t ) = R { \ textbf { e } } _ { r } + Z_ { 0 } { \ hat { k } }, }

where R and Z0 are constants. In this case, the velocity VP is given by:
- V P. = d d t ( R e r + Z 0 k ^ ) = R θ ˙ e θ = R ω e θ, { \ displaystyle { \ textbf { V } } _ { P } = { \ frac { d } { dt } } ( R { \ textbf { e } } _ { r } + Z_ { 0 } { \ hat { k } } ) = R { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } = R \ omega { \ textbf { e } } _ { \ theta }, }

where
- ω = θ ˙, { \ displaystyle \ omega = { \ dot { \ theta } }, }

is the angular velocity of the unit vector eθ around the z axis of the cylinder.
The acceleration AP of the particle P is now given by:
- A P = d d t ( R θ ˙ e θ ) = − R θ ˙ 2 e r + R θ ¨ e θ. { \ displaystyle { \ textbf { A } } _ { P } = { \ frac { d } { dt } } ( R { \ dot { \ theta } } { \ textbf { e } } _ { \ theta } ) = – R { \ dot { \ theta } } ^ { 2 } { \ textbf { e } } _ { r } + R { \ ddot { \ theta } } { \ textbf { e } } _ { \ theta }. }

The components
- a r = − R θ ˙ 2, a θ = R θ ¨, { \ displaystyle a_ { r } = – R { \ dot { \ theta } } ^ { 2 }, \ quad a_ { \ theta } = R { \ ddot { \ theta } }, }

are called, respectively, the radial and tangential components of acceleration.
The notation for angular velocity and angular acceleration is often defined as
- ω = θ ˙, α = θ ¨, { \ displaystyle \ omega = { \ dot { \ theta } }, \ quad \ alpha = { \ ddot { \ theta } }, }

so the radial and tangential acceleration components for circular trajectories are also written as
- a r = − R ω 2, a θ = R α. { \ displaystyle a_ { r } = – R \ omega ^ { 2 }, \ quad a_ { \ theta } = R \ alpha. }

Khi dùng một lực để đẩy quả bóng, quả bóng sẽ chuyển dời từ vị trí đứng yên đến vị trí mới. Sự chuyển dời của trái banh được gọi là hoạt động. Vậy, Lực tương tác voi vật làm cho vật vận động và di chuyển từ vị trí này đến vị trí khác tạo ra Chuyển động
Tính tương đối[sửa|sửa mã nguồn]
vận tốc của cùng một chuyển động có thể có những giá trị khác nhau đối với những quan sát viên khác nhau. Do đó, vận tốc có tính tương đối. Ví dụ, một vật chuyển động (có vận tốc khác không) so với vật khác nhưng lại đứng yên (có vận tốc bằng không) so với chính mình.
Để đo giá trị của tốc độ, người ta gắn với mỗi quan sát viên nói trên một hệ trục tọa độ để xác lập vị trí trong khoảng trống và một đồng hồ đeo tay để xác lập thời hạn. Hệ trục tọa độ và đồng hồ đeo tay được gọi là hệ quy chiếu. Các quan sát viên khác nhau hoàn toàn có thể có hệ quy chiếu khác nhau và quan sát thấy những tốc độ khác nhau của cùng một vật thể đang hoạt động. Như vậy, tốc độ của hoạt động phụ thuộc vào vào hệ quy chiếu tại đó vị trí và thời hạn được ghi nhận .
Cộng tốc độ trong Cơ học cổ xưa[sửa|sửa mã nguồn]
Như đã nói ở trên, vận tốc có tính tương đối và, do đó, có thể nhận các giá trị khác nhau đối với các hệ quy chiếu khác nhau. Để “chuyển đổi” vận tốc từ hệ quy chiếu này sang hệ quy chiếu khác, người ta sử dụng phép cộng vận tốc.
Trong Cơ học cổ điển, công thức cộng vận tốc đơn giản là phép cộng véctơ được thể hiện như sau:
- v → A B = v → A C + v → C B { \ displaystyle { \ vec { v } } _ { AB } = { \ vec { v } } _ { AC } + { \ vec { v } } _ { CB } }

Trong đó :
- v → A B { \ displaystyle { \ vec { v } } _ { AB } }
- v → A C { \ displaystyle { \ vec { v } } _ { AC } }
- v → C B { \ displaystyle { \ vec { v } } _ { CB } }



Như vậy, vận tốc của một vật A đối với hệ quy chiếu B bằng vận tốc của A đối với một hệ quy chiếu trung gian C cộng với vận tốc của hệ quy chiếu trung gian đó đối với hệ quy chiếu B.
Thuyết tương đối hẹp[sửa|sửa mã nguồn]
Trong thuyết tương đối hẹp, tốc độ được lan rộng ra ra thành vận tốc-4 trong không-thời gian. Nó là đạo hàm theo thời hạn của véctơ vị trí-4 :
- U a : = d x a d τ = d x a d t d t d τ = ( γ c, γ u ) { \ displaystyle U ^ { a } : = { \ frac { dx ^ { a } } { d \ tau } } = { \ frac { dx ^ { a } } { dt } } { \ frac { dt } { d \ tau } } = \ left ( \ gamma c, \ gamma \ mathbf { u } \ right ) }

với u là véctơ vận tốc trong không gian ba chiều thông thường
- u i = d x i d t { \ displaystyle u ^ { i } = { \ frac { dx ^ { i } } { dt } } }

và i = 1, 2, 3. Chú ý rằng:
Xem thêm: Một Số Ý Tưởng Sáng Tạo Khoa Học Kỹ Thuật Dành Cho, Những Sáng Chế Hay Của Học Sinh, Sinh Viên
- U a U a = − c 2 { \ displaystyle U ^ { a } U_ { a } = – c ^ { 2 } \, }

Source: https://mix166.vn
Category: Công Nghệ










